1 初识FreeRTOS
1.1简介
FreeRTOS 由美国的 Richard Barry 于 2003 年发布,Richard Barry 是 FreeRTOS 的拥有者和维护者,在过去的十多年中 FreeRTOS 历经了 9 个版本,与众多半导体厂商合作密切,累计开发者数百万,是目前市场占有率最高的 RTOS。
FreeRTOS 于 2018 年被亚马逊收购,改名为 AWS FreeRTOS,版本号升级为 V10,且开源协议也由原来的 GPLv2+修改为 MIT,与 GPLv2+相比,MIT 更加开放,
有很多的文档和例程均能在FreeRTOS的官网: 找到。我学习RTOS过程基本上是看书——看视频——看文档——写代码,在写代码时遇到不会的再重复看前面的内容,书、视频、文档综合起来看就能搞明白很多知识点。最后再在学习过程中写下这本RTOS学习笔记。
1.2 STM32CubeMX创建第一个FreeRTOS工程
这次使用的开发板是立创开发板天空星STM32F407,其主控是STM32F407VGT6,官方wiki资料页面 。使用开发软件是STM32CubeMX 、Keil5、安装了EIDE及C/C++插件的VSCode,其中,CubeMX是用图形化界面快速配置引脚及生成工程模板的,这样能将主要精力花在学习FreeRTOS上而非敲各种功能和引脚的初始化代码;安装了插件的VSCode拿来编写主要代码,其代码提示和可操作性比Keil5强;而Keil5主要用来调试代码。
调试下载器使用的是自己做的J-Link Base,使用SW方式下载调试。
接下来使用CubeMX创建一个新项目选择主控STM32F407VGT6,做如下配置:
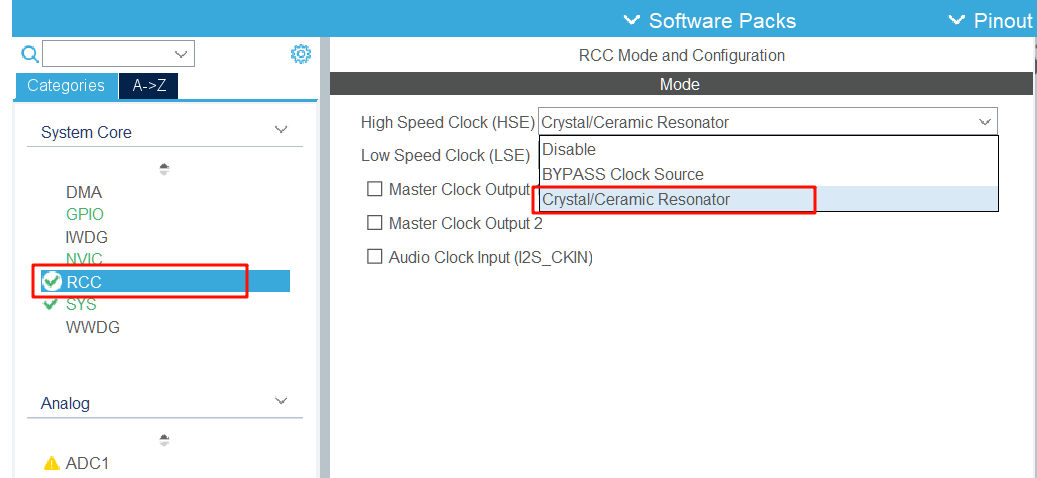
(1)配置RCC 中的HSE高速时钟为晶振
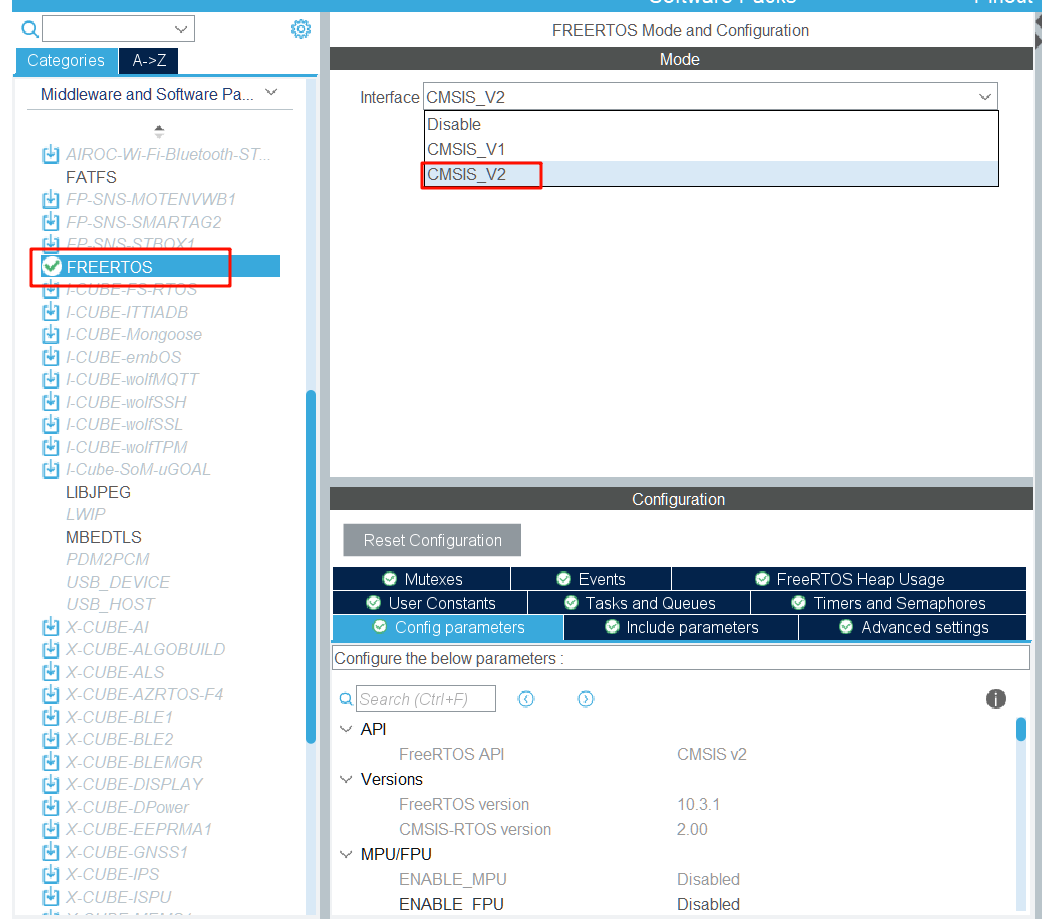
 (2)在Middleware and Software packs中,将接口改为CMSIS_V2,其他的不用动
(2)在Middleware and Software packs中,将接口改为CMSIS_V2,其他的不用动
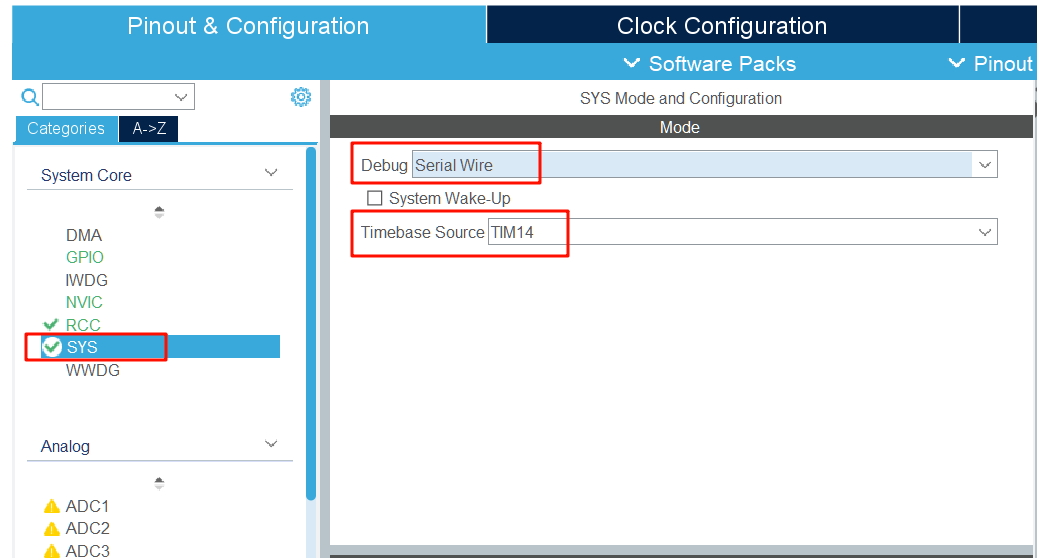
(3)将Sys中的Timebase Source 改为定时器TIM1~TIM14中的任意一个,这里改为TIM14。顺带把Debug改一下,改为Serial Wire。
如果不改,在生成代码时会出现下面的提示。
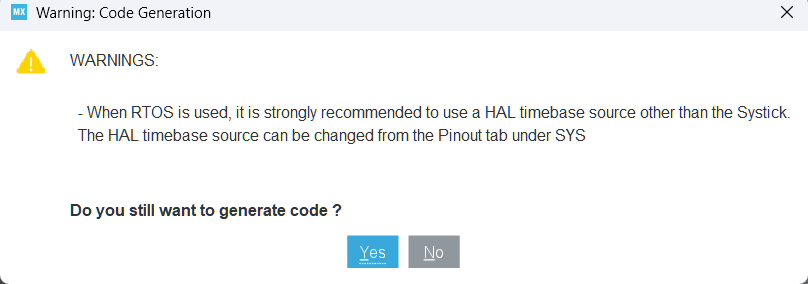
原因是在HAL库驱动中,由于某些外设的驱动需要使用超时判断(比如 I2C、 SPI、 SDIO 等),需要精确延时(精度为 1ms),使用的是 SysTick,但是在操作系统里面,我们需要使用 SysTick 来提供系统时基, 那么就冲突了。
HAL库的时钟源主要用于HAL_Delay()这个函数,这个函数用于实现延时以及上面说的外设驱动的超时判断。这个函数主要是靠不断读取SysTick计数器的值来实现延迟。
但是加入了RTOS之后,RTOS强制将SysTick的中断设置为最低,假设在一个中断优先级比SysTick高的中断int_a中调用HAL_Delay()来进行延时,那么由于int_a中断优先级高于SysTick,从而导致SysTick无法抢占,也就无法增加计数器的值,就会导致int_a中断服务函数死等HAL_Delay()延时,无法退出,从而造成比int_a优先级低的中断服务都无法使用,系统也无法调度。
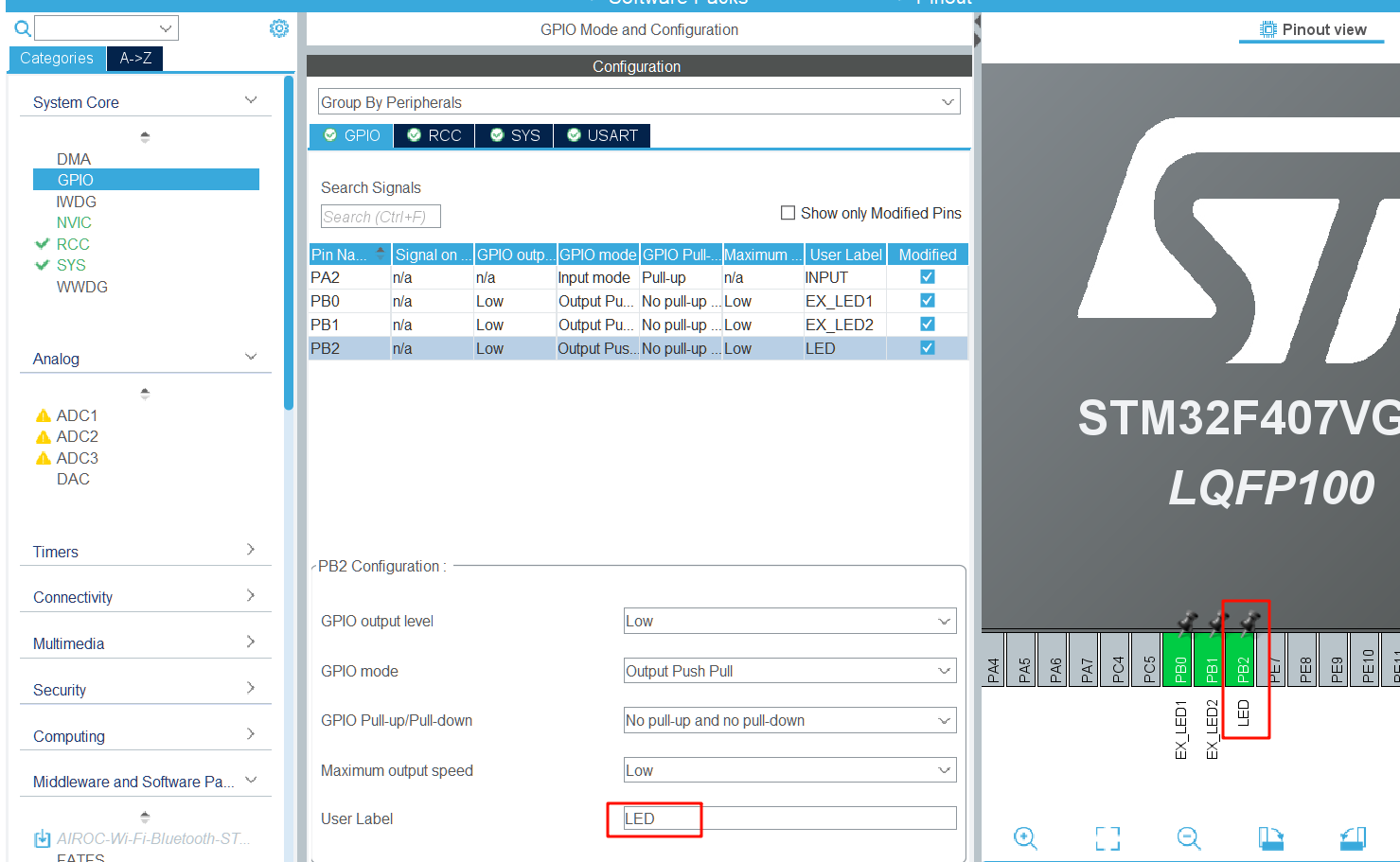
(4)配置PB2引脚为推挽输出,将User Label命名为LED
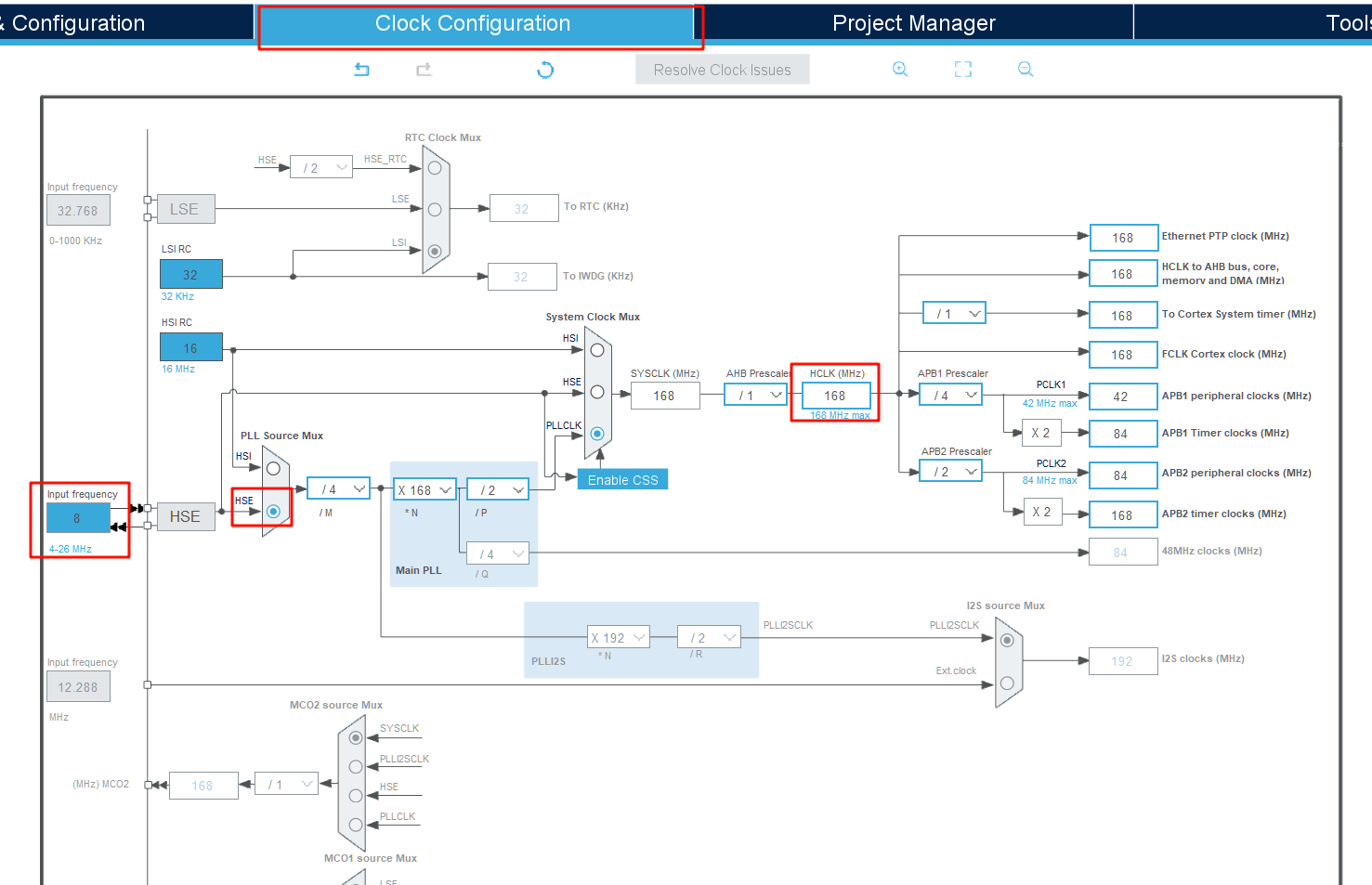
(5)在Clock Configuration页面中,把HSE的频率改为8MHz,PLL Source Mux改为HSE,HLCK改为168,然后按回车键,程序会自动调整其他时钟频率。
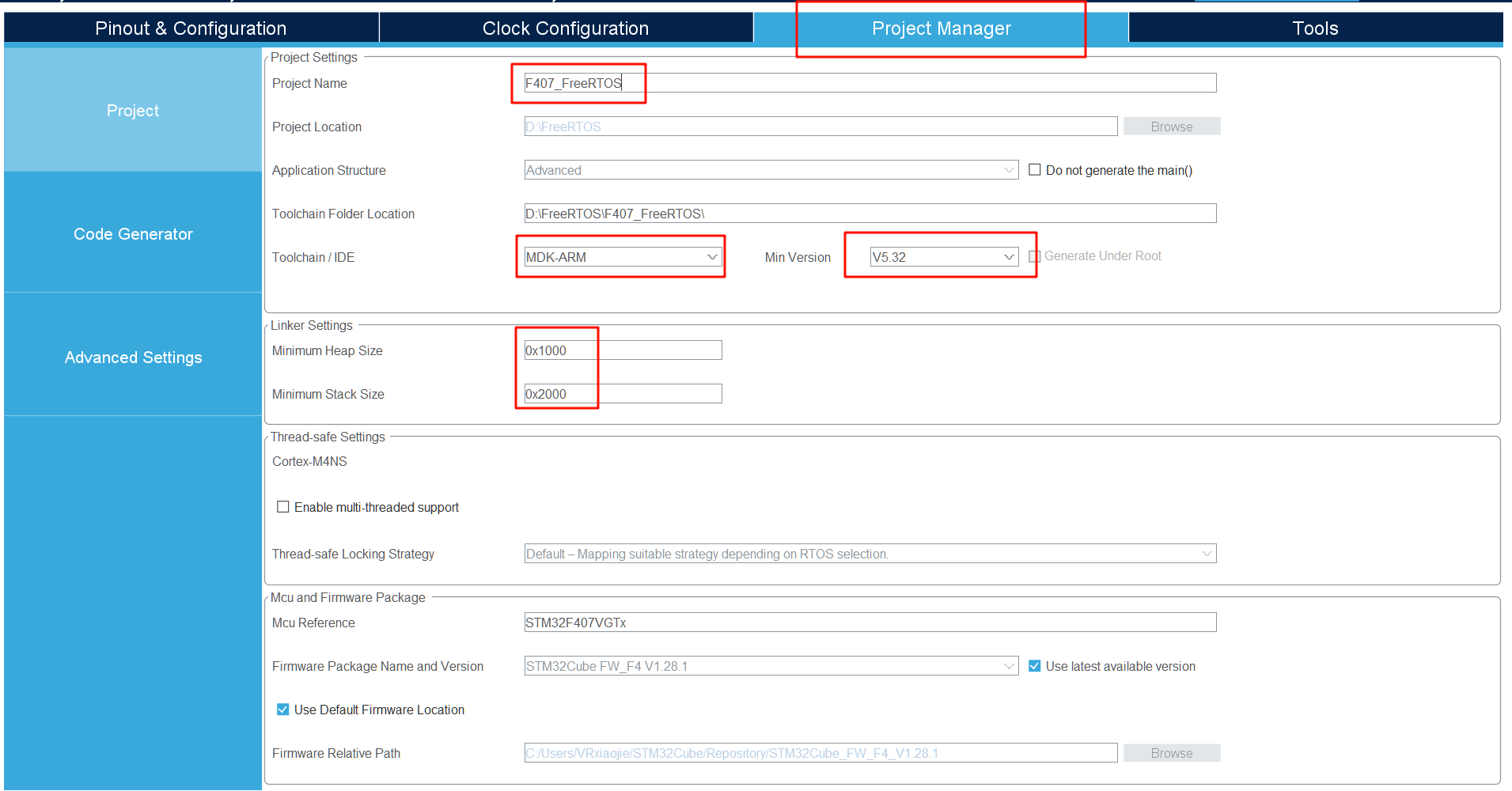
 (6)在Project Manager页面中,修改项目名称、IDE改为MDK_ARM,修改堆大小0x1000,栈大小0x2000
(6)在Project Manager页面中,修改项目名称、IDE改为MDK_ARM,修改堆大小0x1000,栈大小0x2000
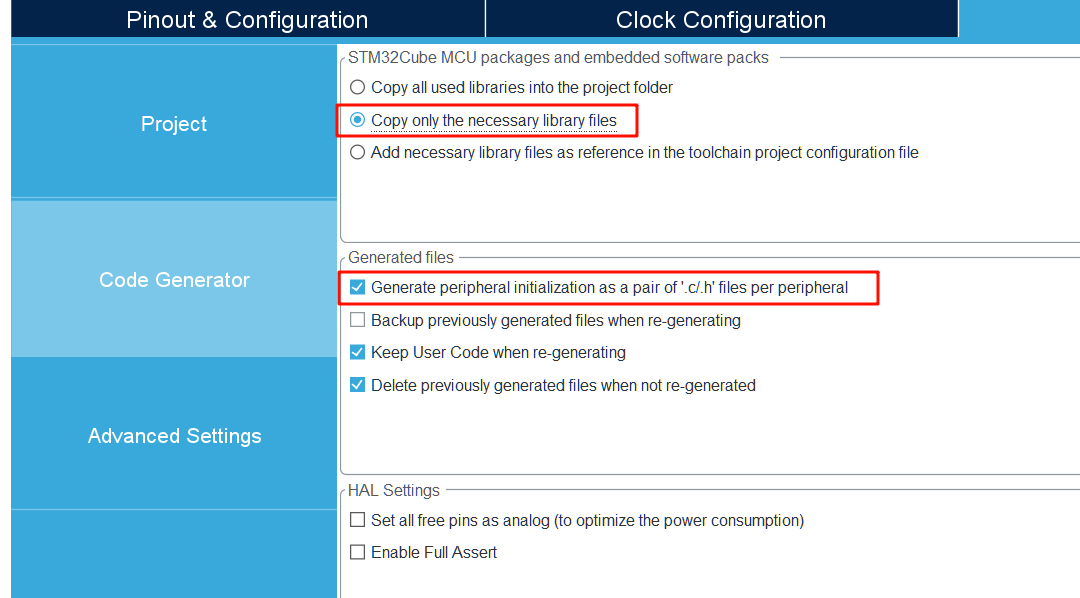
此外,选择左侧的Code Generator,修改下图两个选项。其含义分别是只复制必要的库文件、为每个外设生成对应的.c和.h文件。
(7)一切就绪,生成代码。完成后打开项目
1.3 在VSCode-EIDE插件中导入并工程
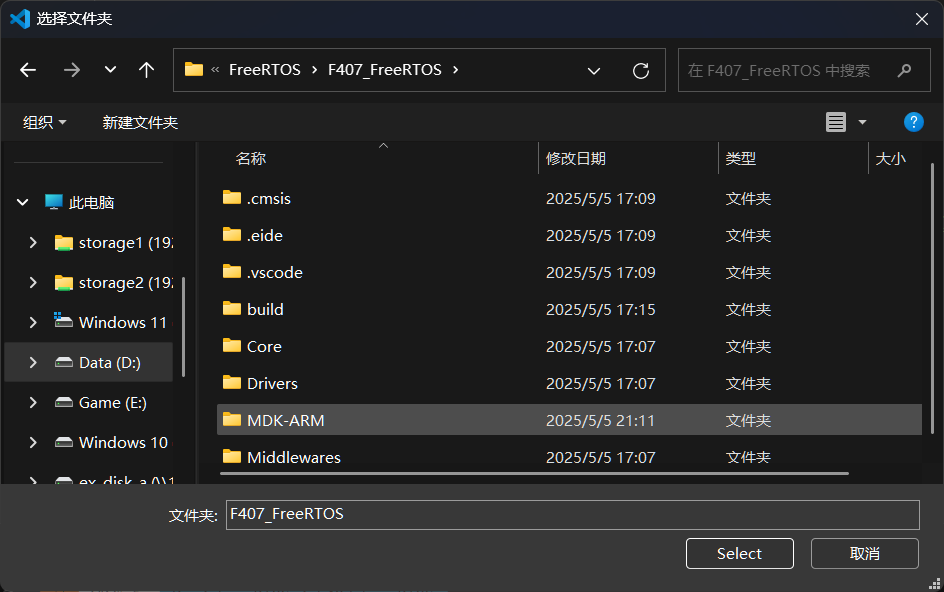
(1)安装EIDE插件,导入项目,找到MDK_ARM文件夹下的 F407_FreeRTOS.uvprojx文件。将eide配置文件存放在指定位置
放在MDK_ARM的上一级目录。
完成后打开新的工作区。
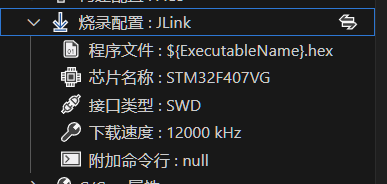
(2)烧录配置这里,我的是JLink,只需要配置一下芯片名称即可,接口类型的SWD。
1.4 点个灯测试一下
既然都配置到这里了,就把之前配置的板载小灯点亮,来做下载测试。
打开freertos.c文件,这里面是CubeMX自动为我们生成的模板,只要在USER CODE BEGIN xxx与 USER CODE END xxx中间编写的代码,都不会被CubeMX自动覆盖掉。
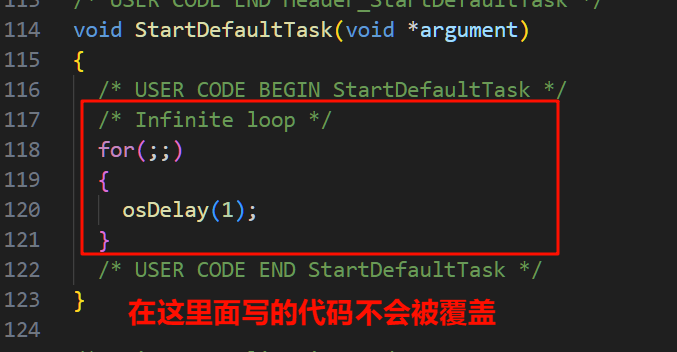
在StartDefaultTask函数内,写入如下代码(注意不要把for死循环删了):
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
vTaskDelay(500);
}
/* USER CODE END StartDefaultTask */
}这段代码很简单,HAL_GPIO_TogglePin是让刚刚配置的LED所接的引脚翻转,即让LED闪烁。其中的每隔vTaskDelay(500)是延时500ms,但这里不是HAL_Delay();这种让整个系统卡住的死等,这函数在后面会说到,目前理解为不会让系统卡死的延时即可。
编译下载,看看效果,LED正常闪烁。