2 FreeRTOS任务创建与删除
任务的创建分为动态创建和静态创建两种方式。任务必须是一个死循环,否则任务将通过 LR 返回,如果 LR 指向了非法的内存就会产生 HardFault_Handler,而 FreeRTOS 指向一个死循环,那么任务返回之后就在死循环中执行,这样子的任务是不安全的,所以避免这种情况,任务一般都是死循环并且无返回值的。
当要结束一个任务时,不能使用return,而是要使用vTaskDelete,只执行一次的任务在执行完毕要记得及时删除。
2.1 动态创建新任务
2.1.1 xTaskCreate函数解释
BaseType_t xTaskCreate( TaskFunction_t pvTaskCode,
const char * const pcName,
const configSTACK_DEPTH_TYPE uxStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t *pxCreatedTask
);Details
pvTaskCode 指向任务入口函数的指针(即实现任务的函数名称)。 任务通常以无限循环的形式实现;实现任务的函数 绝不能尝试返回或退出。但是,任务可以自行删除。
pcName 任务的描述性名称。此参数主要用于方便调试,但也可用于 获取任务句柄。任务名称的最大长度 由 FreeRTOSConfig.h 中的 configMAX_TASK_NAME_LEN 定义。
uxStackDepth 要分配用作任务堆栈的字数(不是字节数!)。例如,如果堆栈宽度为 16 位,uxStackDepth 为 100,则将分配 200 字节用作任务 堆栈。再举一例,如果堆栈宽度为 32 位,uxStackDepth 为 400, 则将分配 1600 字节用作任务堆栈。堆栈深度与堆栈宽度的乘积不得超过 size_t 类型变量所能包含的最大值。
pvParameters 作为参数传递给所创建任务的值。如果 pvParameters 设置为某变量的地址, 则在创建的任务执行时,该变量必须仍然存在, 因此,不能传递堆栈变量的地址。
uxPriority 创建的任务将以该指定优先级执行。支持 MPU 的系统 可以通过在 uxPriority 中设置 portPRIVILEGE_BIT 位来选择以特权(系统)模式创建任务。 例如,要创建优先级为 2 的特权任务,请将 uxPriority 设置为 ( 2 | portPRIVILEGE_BIT )。应断言优先级 低于 configMAX_PRIORITIES。如果 configASSERT 未定义,则优先级默认上限为 (configMAX_PRIORITIES - 1)。
pxCreatedTask 用于将句柄传递至由 xTaskCreate() 函数创建的任务。pxCreatedTask 是可选参数, 可设置为 NULL。
返回: 如果任务创建成功,则返回 pdPASS, 否则返回 errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY。
2.1.2 动态创建任务实验
在freertos.c文件,/* USER CODE BEGIN Variables */之后定义任务句柄 LED_TaskHandle。
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
xTaskHandle LED_TaskHandle;
/* USER CODE END Variables */在freertos.c文件末尾的 /* USER CODE BEGIN Application */之后编写任务函数LED_app。
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
void LED_app(void *args)
{
for (;;) {
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
vTaskDelay(300);
}
}
/* USER CODE END Application */在freertos.c文件 /* USER CODE BEGIN FunctionPrototypes */后声明LED_app函数。
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
void LED_app(void *args);
/* USER CODE END FunctionPrototypes */在freertos.c文件中MX_FREERTOS_Init函数内的/* USER CODE BEGIN RTOS_THREADS */之后编写创建任务代码。
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
xTaskCreate(LED_app, "LED app", 64, NULL, osPriorityNormal1, &LED_TaskHandle);
/* USER CODE END RTOS_THREADS */这里的osPriorityNormal1是CubeMX生成的宏定义,可以在cmsis_os2.h中看到,其优先级是24+1,FreeRTOS中的优先级数值越大,代表优先级越高。Idle(空闲)任务优先级为1。
osPriorityNone = 0, ///< No priority (not initialized).
osPriorityIdle = 1, ///< Reserved for Idle thread.
osPriorityLow = 8, ///< Priority: low
…
osPriorityBelowNormal7 = 16+7, ///< Priority: below normal + 7
osPriorityNormal = 24, ///< Priority: normal
osPriorityNormal1 = 24+1, ///< Priority: normal + 1
…行了,编译下载看看效果,这里把vTaskDelay的时间调短了,板载LED闪烁速度明显变快。
2.2 静态创建新任务
2.2.1 xTaskCreateStatic函数解释
TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode,
const char * const pcName,
const uint32_t ulStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
StackType_t * const puxStackBuffer,
StaticTask_t * const pxTaskBuffer );Details
pxTaskCode 指向任务入口函数的指针(即实现任务的函数名称, 请参阅如下示例)。 任务通常以无限循环的形式实现; 实现任务的函数绝不能尝试返回或退出。但是,任务可以自行删除。
pcName 任务的描述性名称。此参数主要用于方便调试,但也可用于 获取任务句柄。 任务名称的最大长度由 FreeRTOSConfig.h 中的 configMAX_TASK_NAME_LEN 定义。
ulStackDepth puxStackBuffer 参数用于将 StackType_t 变量的数组传递至 xTaskCreateStatic()。ulStackDepth 必须设置为数组中的索引数。
pvParameters 作为参数传递给所创建任务的值。如果 pvParameters 设置为某变量的地址,则在创建的任务执行时,该变量必须仍然存在, 因此,不能传递堆栈变量的地址。
uxPriority 创建的任务将以该指定优先级执行。
puxStackBuffer 必须指向至少包含 ulStackDepth 个索引的 StackType_t 数组(见上述 ulStackDepth 参数), 该数组将用作任务堆栈,因此必须持久存在 (不能在函数的堆栈上声明)。
pxTaskBuffer 必须指向 StaticTask_t 类型的变量。该变量将用于保存新任务的数据 结构体 (TCB),因此必须持久存在(不能在函数的堆栈上声明)。
返回: 如果 puxStackBuffer 和 pxTaskBuffer 均不为 NULL,则创建任务,并返回任务的句柄。 如果 puxStackBuffer 或 pxTaskBuffer 为 NULL,则不会创建任务, 并返回 NULL。
2.2.2 静态创建任务实验
在freertos.c中 /* USER CODE BEGIN PD */,定义栈大小
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define STACK_SIZE 128
/* USER CODE END PD */注释掉LED_TaskHandle这个句柄,变量中新定义一个指向保存任务数据的结构体一个数组LED_TaskStack作为栈空间。
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
// xTaskHandle LED_TaskHandle;
StaticTask_t LED_TaskBuffer;
StackType_t LED_TaskStack[ STACK_SIZE ];
/* USER CODE END Variables */可以将上面动态创建任务实验的代码xTaskCreate部分注释掉。新增使用xTaskCreateStatic创建任务的函数。
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
// xTaskCreate(LED_app, "LED app", 64, NULL, osPriorityNormal1, &LED_TaskHandle);
xTaskCreateStatic(LED_app, "LED app Static", STACK_SIZE, NULL, osPriorityNormal1, LED_TaskStack, &LED_TaskBuffer);
/* USER CODE END RTOS_THREADS */2.3 删除任务
2.3.1 vTaskDelete 函数解释
void vTaskDelete( TaskHandle_t xTask );Details
参数: xTask 要删除的任务的句柄。如果传递 NULL,会删除调用任务。
2.3.2 删除任务实验
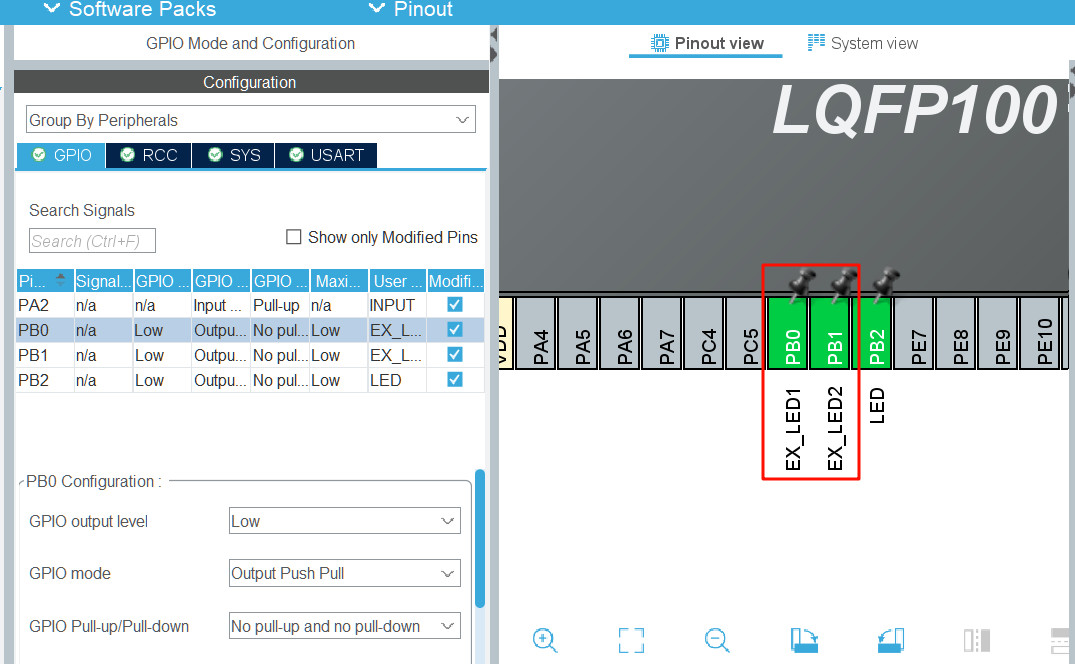
(1)由于天空星开发板上只有一个板载LED,手头其他的开发板上有2个LED的,因此需要再在天空星开发板上配两个推挽输出的GPIO去驱动外置LED。
在CubeMX中启用两个GPIO,我这里设置的是PB0和PB1,配置成推挽输出模式,UserLabel分别设置为EX_LED1和EX_LED2。完成之后生成代码。
(2)在USER CODE BEGIN Variables代码块下新增两个变量,用于存放任务句柄。
TaskHandle_t ex_LED1_TaskHandle = NULL;
TaskHandle_t ex_LED2_TaskHandle = NULL;(3)在USER CODE BEGIN Application代码块下新增两个函数,用于驱动外部LED的闪烁任务。
void External_LED1_app(void *args)
{
for (;;) {
HAL_GPIO_TogglePin(EX_LED1_GPIO_Port, EX_LED1_Pin);
osDelay(200);
}
}
void External_LED2_app(void *args)
{
static uint8_t cnt;
for (;;) {
if (cnt < 5) {
cnt++;
}
if (cnt == 5 && ex_LED1_TaskHandle != NULL) {
vTaskDelete(ex_LED1_TaskHandle);
ex_LED1_TaskHandle = NULL;
}
HAL_GPIO_TogglePin(EX_LED2_GPIO_Port, EX_LED2_Pin);
osDelay(400);
}
}在External_LED2_app函数中,我设定了一个计数变量cnt,当cnt等于5且外部LED1闪烁任务句柄不为NULL时,去删除外部LED1闪烁的任务,并置句柄为NULL,防止再次删除一个不存在的任务而导致系统宕机。
(4)在USER CODE BEGIN RTOS_THREADS 中,调用创建动态任务的函数xTaskCreate,并传入相应参数。
xTaskCreate(LED_app, "LED app", 64, NULL, osPriorityNormal1, &LED_TaskHandle);
xTaskCreate(External_LED1_app, "external LED1 app", 64, NULL, osPriorityNormal1, &ex_LED1_TaskHandle);
xTaskCreate(External_LED2_app, "external LED2 app", 64, NULL, osPriorityNormal1, &ex_LED2_TaskHandle);(5)在USER CODE BEGIN FunctionPrototypes 中声明函数。
void LED_app(void *args);
void External_LED1_app(void *args);
void External_LED2_app(void *args);(6)编译下载,外部LED1在经过了两秒后熄灭,而外部LED2和板载LED正常闪烁。
2.3.3 删除当前任务实验
从2.3.1节的函数解释得知,vTaskDelete的参数如果为NULL,则会删除当前任务。
把2.3.2节写在USER CODE BEGIN RTOS_THREADS 代码块里的内容删掉,转而放在自动生成的默认任务 StartDefaultTask里面。在循环体的最后调用vTaskDelete(NULL); 如下所示。
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for (;;) {
xTaskCreate(LED_app, "LED app", 64, NULL, osPriorityNormal1, &LED_TaskHandle);
xTaskCreate(External_LED1_app, "external LED1 app", 64, NULL, osPriorityNormal1, &ex_LED1_TaskHandle);
xTaskCreate(External_LED2_app, "external LED2 app", 64, NULL, osPriorityNormal1, &ex_LED2_TaskHandle);
vTaskDelete(NULL);
}
/* USER CODE END StartDefaultTask */
}这样就实现了调用默认任务去创建所有的任务,然后删除默认任务的操作。