软件部分
将先前的项目模板复制一份,重命名为02_DAC-ADC-Voltage
1. 配置DAC
先进入Pins页面
| 序号 | 操作 |
|---|---|
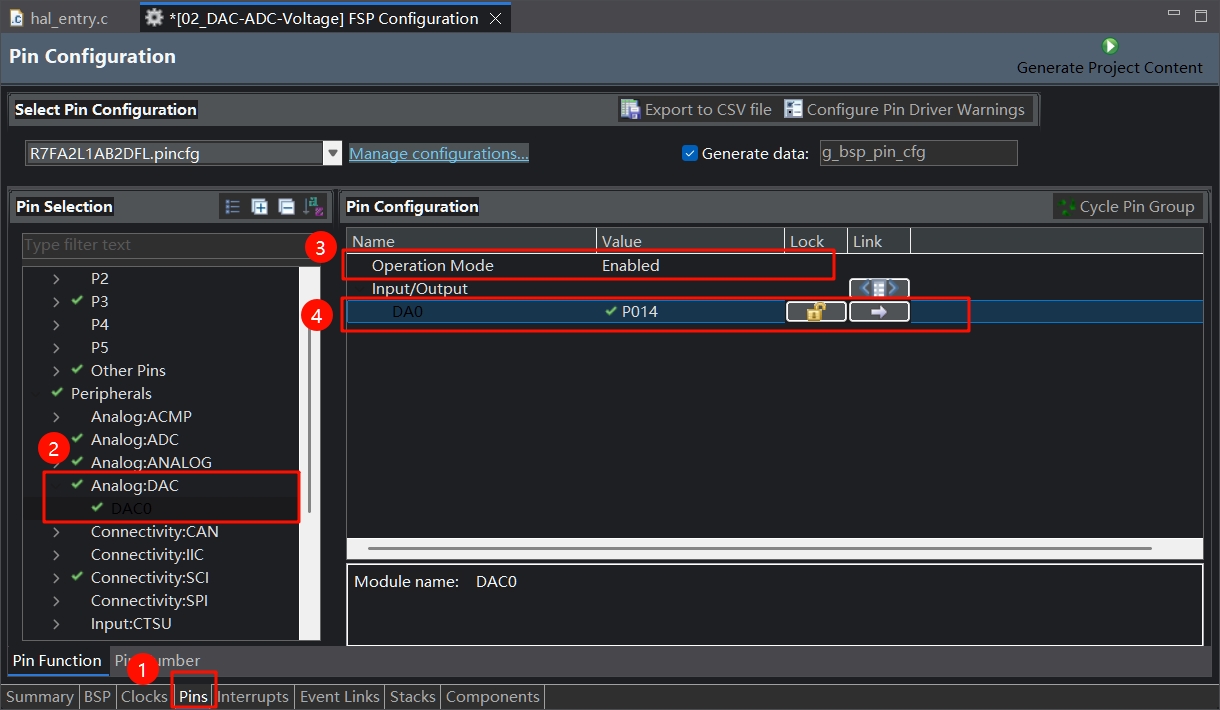
| 1 | 点击界面下方标签栏中的Pins标签,进入引脚配置界面。 |
| 2 | 在Pin Selection区域,展开Analog选项,选择Analog:DAC下的DAC0。 |
| 3 | 在Pin Configuration区域,将Operation Mode设置为Enabled。 |
| 4 | 在Pin Configuration区域,勾选DAC0对应的P014引脚。 |
再来到Stacks页面
| 序号 | 操作 |
|---|---|
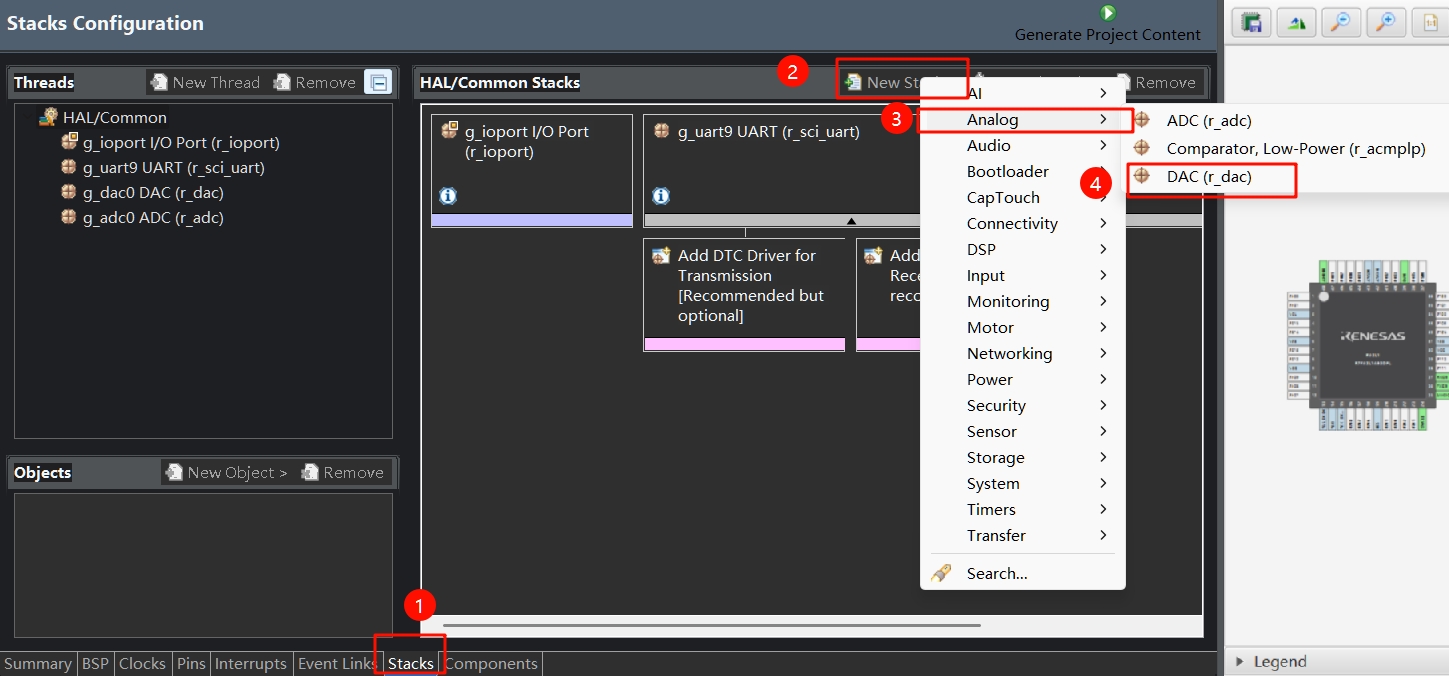
| 1 | 点击界面下方标签栏中的Stacks标签,进入堆栈配置页面。 |
| 2 | 在HAL/Common Stacks区域,点击New Stack按钮。 |
| 3 | 在弹出菜单中,选择Analog选项。 |
| 4 | 在Analog子菜单中,选择DAC (r_dac)。 |
最后配置DAC的属性
| 序号 | 操作 |
|---|---|
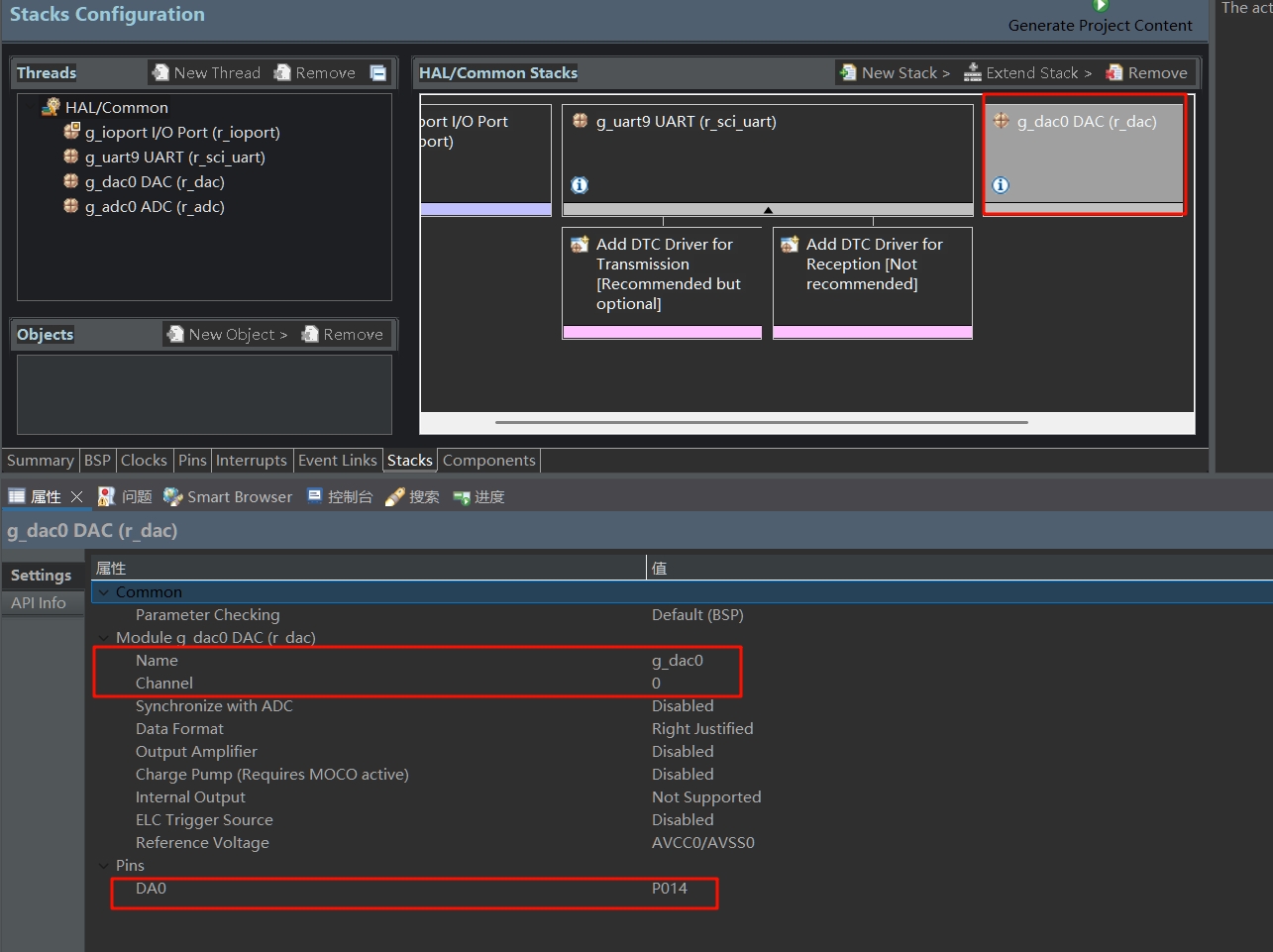
| 1 | 在HAL/Common Stacks区域,点击选中g_dac0 DAC (r_dac)。 |
| 2 | 在下方Settings设置区域,Module g_dac0 DAC (r_dac)部分,确认Name为g_dac0,Channel为0。 |
| 3 | 在Settings设置区域的Pins部分,确认DAC0对应P014。 |
2. 配置ADC
进入Pins页面
| 序号 | 操作 |
|---|---|
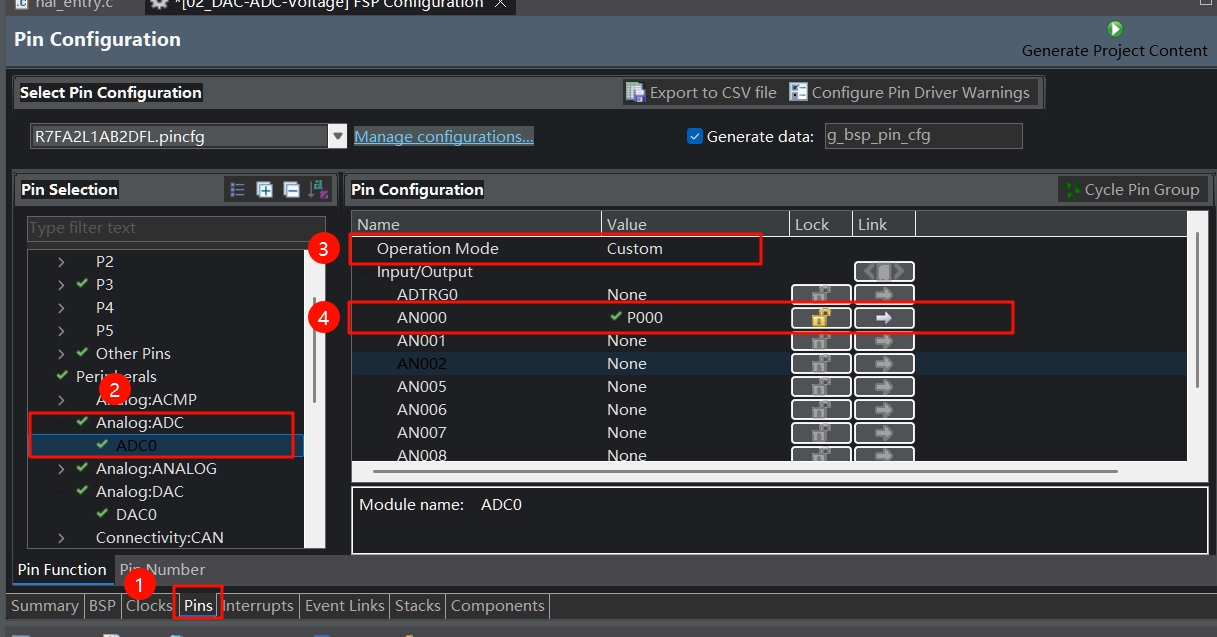
| 1 | 点击界面下方标签栏中的Pins标签,进入引脚配置界面。 |
| 2 | 在Pin Selection区域,展开Analog:ADC选项,选择ADC0。 |
| 3 | 在Pin Configuration区域,将Operation Mode设置为Custom。 |
| 4 | 在Pin Configuration区域,勾选AN000对应的P000引脚。 |
进入Stacks页面
| 序号 | 操作 |
|---|---|
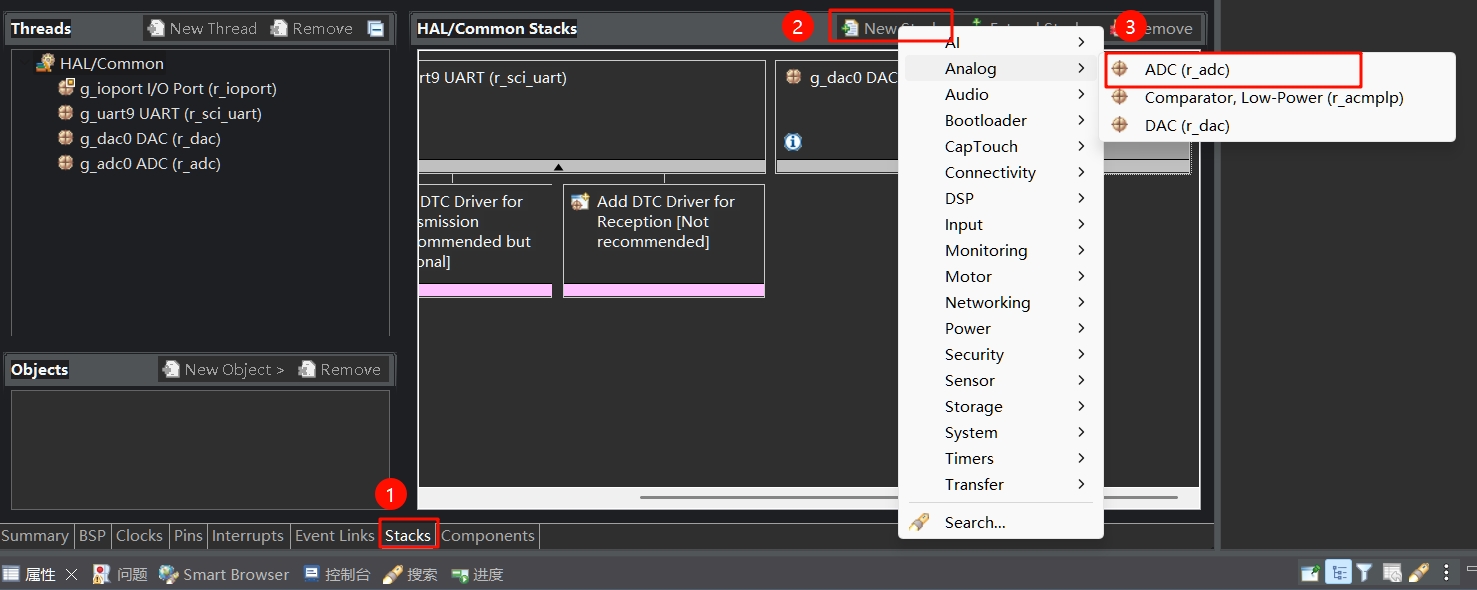
| 1 | 点击界面下方标签栏中的Stacks标签,进入堆栈配置页面。 |
| 2 | 在HAL/Common Stacks区域,点击New Stack按钮。 |
| 3 | 在弹出菜单中,选择Analog选项下的ADC (r_adc)。 |
| 序号 | 操作 |
|---|---|
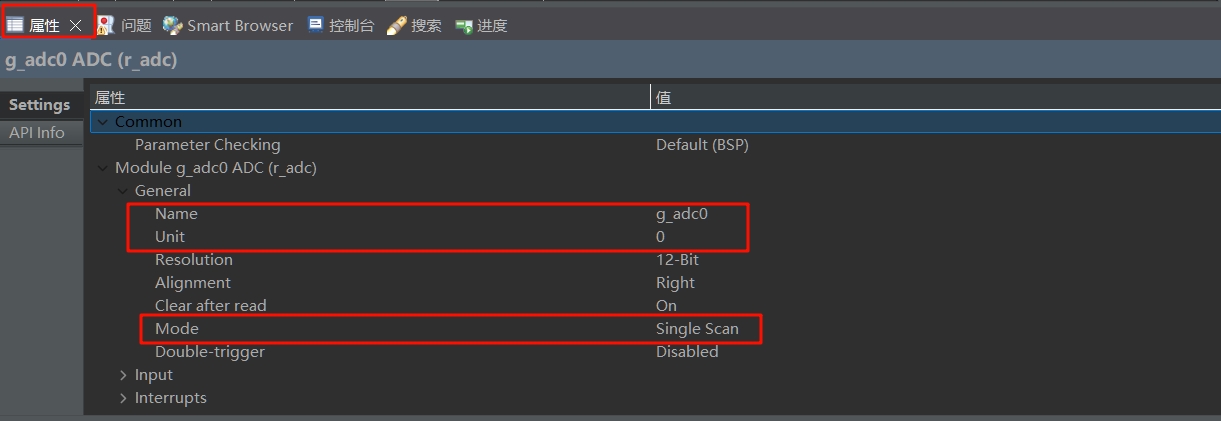
| 1 | 在Settings设置区域的Module g_adc0 ADC (r_adc) - General部分,设置Name为g_adc0,Unit为0。 |
| 2 | 在Settings设置区域的Module g_adc0 ADC (r_adc) - General部分,设置Mode为Single Scan。 |
| 序号 | 操作 |
|---|---|
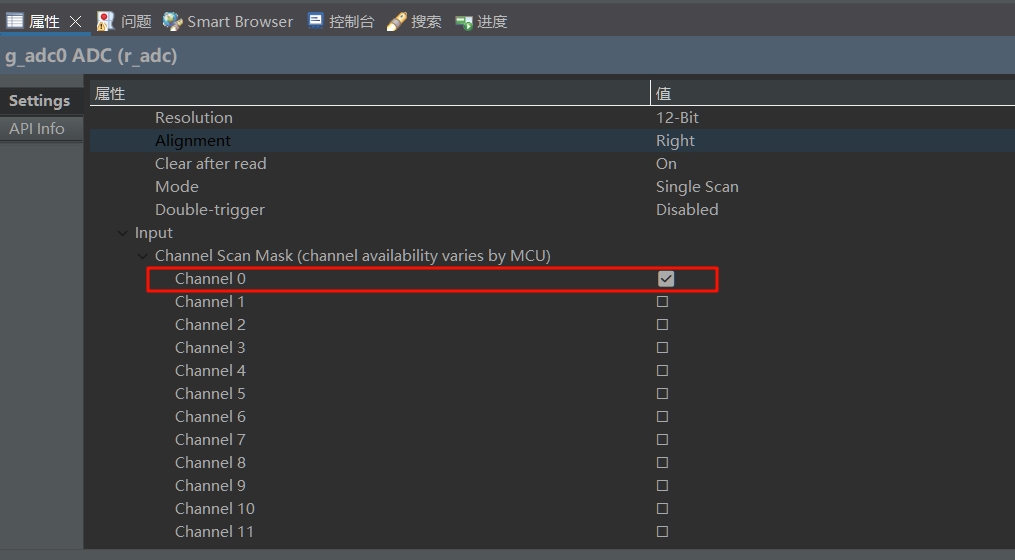
| 1 | 在Settings设置区域的Input - Channel Scan Mask (channel availability varies by MCU)部分,勾选Channel 0。 |
| 序号 | 操作 |
|---|---|
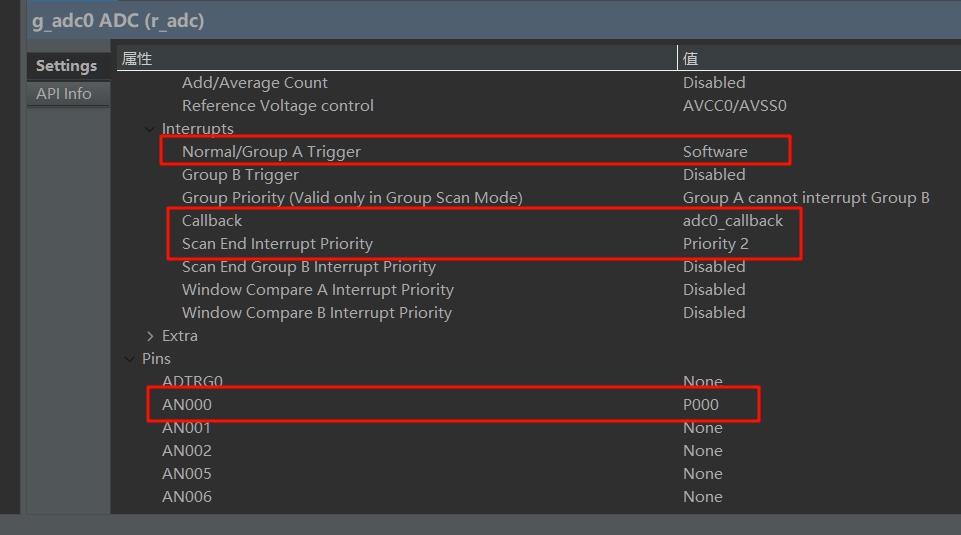
| 1 | 在Settings设置区域的Interrupts部分,设置Normal/Group A Trigger为Software。 |
| 2 | 在Settings设置区域的Interrupts部分,设置Callback为adc0_callback,Scan End Interrupt Priority为Priority 2。 |
| 3 | 在Settings设置区域的Pins部分,确认AN000对应P000。 |
配置完成后,生成项目代码。
3. 编写代码
3.1 新建adc.h
新建文件adc.h,加入以下代码
c
#ifndef ADC_H_
#define ADC_H_
void adc0_waitComplete();
#endif3.2 新建adc.c
这段代码中实现了adc的回调函数adc0_callback,当ADC扫描完成时会自动调用。在回调函数中将标志位scan_complete_flag设为true,以便adc0_waitComplete函数退出死循环。
新建文件adc.c,加入以下代码
c
#include "adc.h"
#include "hal_data.h"
volatile static bool scan_complete_flag = true;
void adc0_callback(adc_callback_args_t *p_args)
{
FSP_PARAMETER_NOT_USED(p_args);
scan_complete_flag = true;
}
void adc0_waitComplete()
{
scan_complete_flag = false;
while (!scan_complete_flag)
{
/* Wait for callback to*/
}
}3.3 修改hal_entry.c
在这里要实现用DAC输出电压,ADC采集电压,每隔200ms递增或递减一次DAC输出的电压值,同时打印到串口。 在hal_entry.c的文件开头加入:
c
#include "adc.h"
uint16_t adc_data = 0;在hal_entry函数中加入:
c
typedef enum
{
up,
down
} Direction;
Direction d = up;
uint16_t dac_value = 0;
Debug_UART9_Init(); // SCI9 UART 调试串口初始化
g_dac0.p_api->open(&g_dac0_ctrl, &g_dac0_cfg);
g_dac0.p_api->start(&g_dac0_ctrl);
g_adc0.p_api->open(&g_adc0_ctrl, &g_adc0_cfg);
g_adc0.p_api->scanCfg(&g_adc0_ctrl, &g_adc0_channel_cfg);
while (1)
{
g_dac0.p_api->write(&g_dac0_ctrl, dac_value);
g_adc0.p_api->scanStart(&g_adc0_ctrl);
adc0_waitComplete();
g_adc0.p_api->read(&g_adc0_ctrl, ADC_CHANNEL_0, &adc_data);
double volt = (double)(adc_data / 4095.0) * 3.3;
printf("adc_data: %d, 电压: %.3lf V\n", adc_data, volt);
if (d == up)
{
dac_value += 500;
}
else
{
dac_value -= 500;
}
if (dac_value >= 4000)
{
d = down;
}
if (dac_value == 0)
{
d = up;
}
R_BSP_SoftwareDelay(200, BSP_DELAY_UNITS_MILLISECONDS);
}注意,这里是用了面向对象的编程方法,参考教程为:《ARM嵌入式系统中面向对象的模块编程方法》基于DShanMCU-RA6M5(瑞萨MCU) 也可以用瑞萨FSP库的函数编程,一样的。 例如
c
g_dac0.p_api->write(&g_dac0_ctrl, dac_value);就可以用FSP库代替
c
R_DAC_Write(&g_dac0_ctrl, dac_value);