软件部分
将先前03_RTC工程复制一份,重命名为05_Low-Power-Mode-Btn-Wakeup。
1 配置按键外部中断
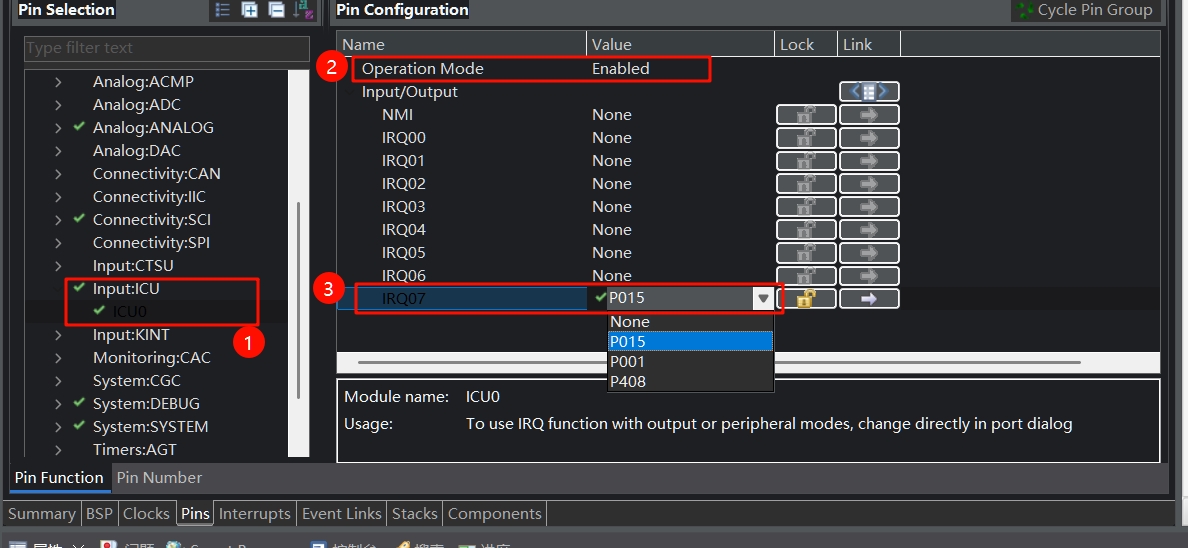
从开发板的原理图可以得知,用户按键接在P015引脚上,而其对应的中断请求(IRQ)通道为IRQ7
| 序号 | 操作 |
|---|---|
| 1 | 点击界面下方标签栏中的Pins标签,进入引脚配置界面。 |
| 2 | 在Pin Selection区域,展开Input:ICU选项,选择ICU0。 |
| 3 | 在Pin Configuration区域,将Operation Mode设置为Enabled,勾选IRQ07对应的P015引脚。 |
| 序号 | 操作 |
|---|---|
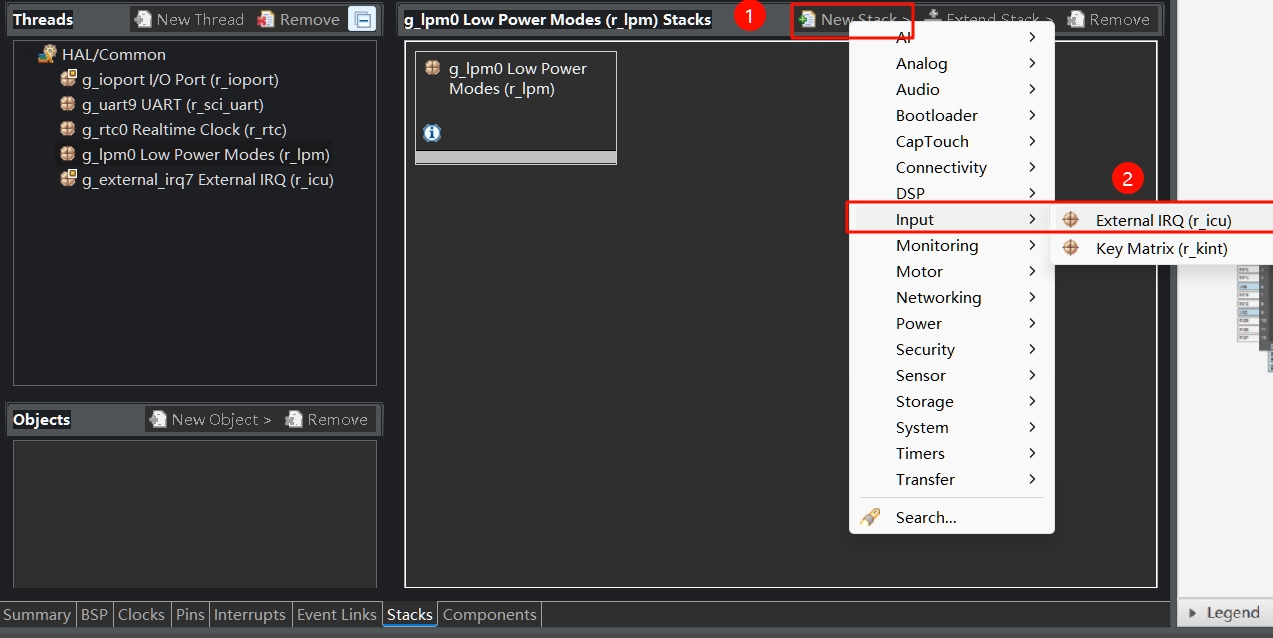
| 1 | 点击界面下方标签栏中的Stacks标签,进入堆栈配置页面。 |
| 2 | 在HAL/Common Stacks区域,点击New Stack按钮。 |
| 3 | 在弹出菜单中,选择Input选项下的External IRQ (r_icu)。 |
| 序号 | 操作 |
|---|---|
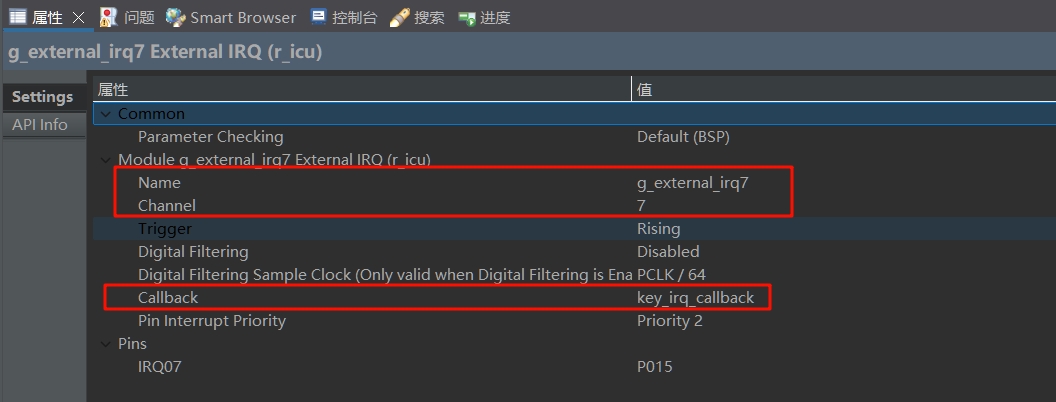
| 1 | 在下方Settings设置区域的Module g_external_irq7 External IRQ (r_icu)部分,设置Name为g_external_irq7,Channel为7。 |
| 2 | Module g_external_irq7 External IRQ (r_icu)部分,设置Callback为key_irq_callback,Pin Interrupt Priority为Priority 2。 |
2 配置低功耗模式
| 序号 | 操作 |
|---|---|
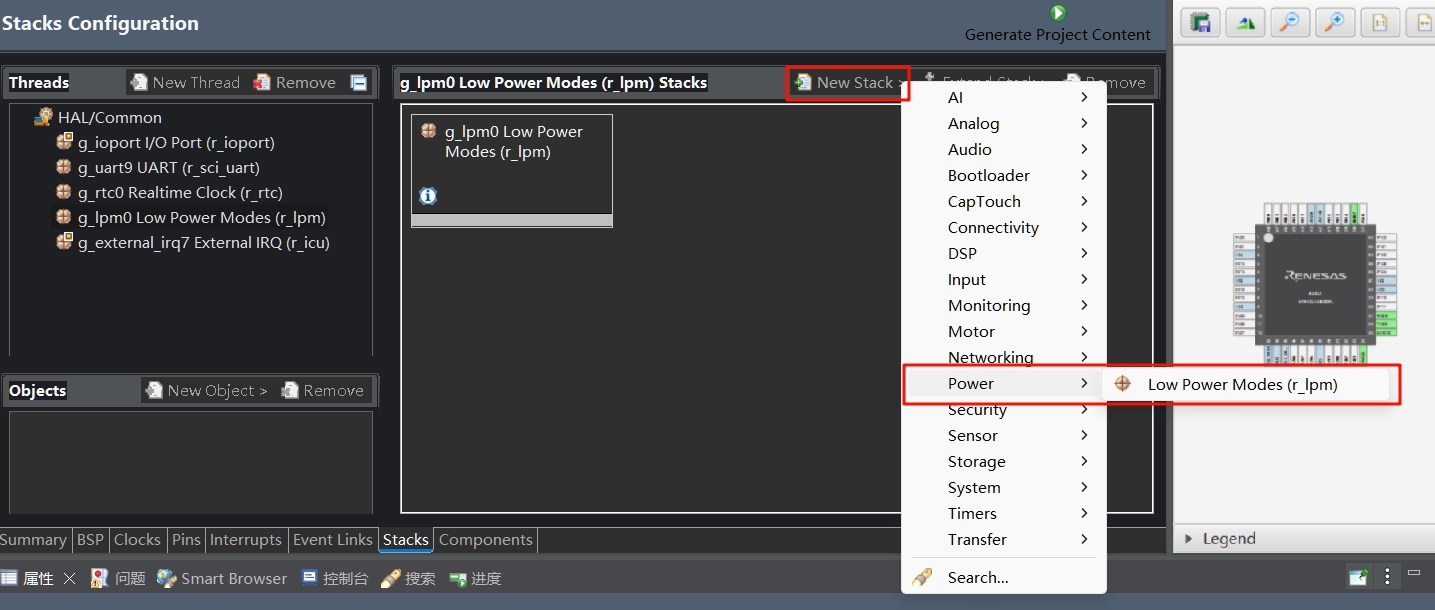
| 1 | 点击界面下方标签栏中的Stacks标签,进入堆栈配置页面。 |
| 2 | 在HAL/Common Stacks区域,点击New Stack按钮。 |
| 3 | 在Power子菜单中,选择Low Power Modes (r_lpm)。 |
| 序号 | 操作 |
|---|---|
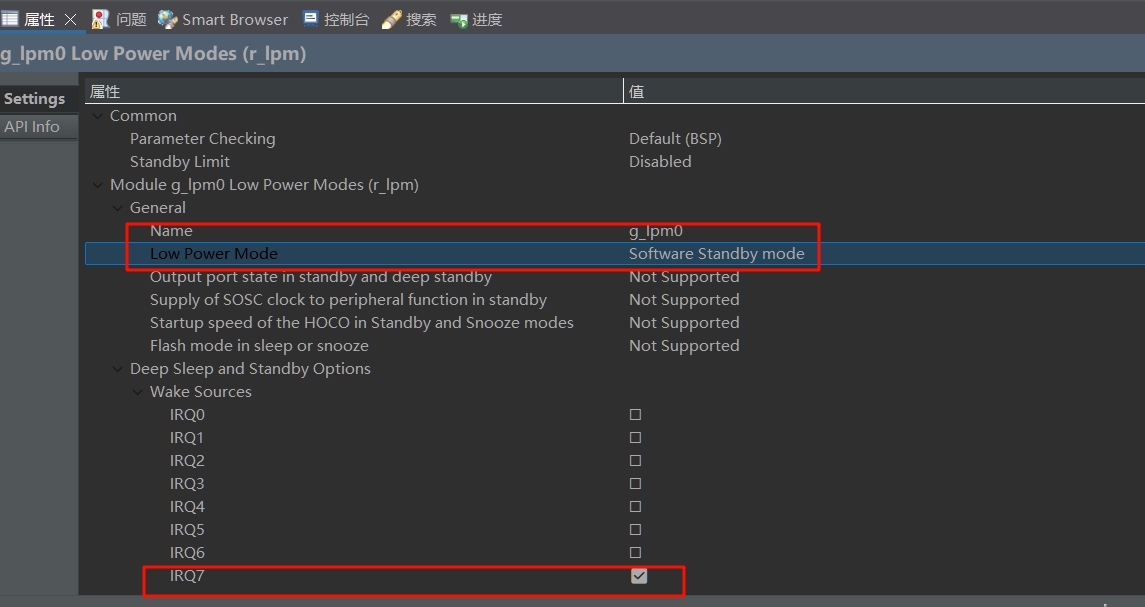
| 1 | 在下方Settings设置区域的Module g_lpm0 Low Power Modes (r_lpm)部分,设置Name为g_lpm0。 |
| 2 | 在Settings设置区域的Module g_lpm0 Low Power Modes (r_lpm)部分,将Low Power Mode设置为Software Standby mode。 |
| 3 | Module g_lpm0 Low Power Modes (r_lpm) - Wake Sources部分,勾选IRQ7。 |
3 编写代码
3.1 按键中断
新建irq.h
查看代码
c
#ifndef IRQ_H_
#define IRQ_H_
#include "hal_data.h"
void IRQ_Init();
extern volatile bool key_pressed;
#endif新建irq.c
查看代码
c
#include "irq.h"
#include "hal_data.h"
volatile bool key_pressed = false;
void key_irq_callback(external_irq_callback_args_t *p_args)
{
key_pressed = true;
}
void IRQ_Init()
{
g_external_irq7.p_api->open(&g_external_irq7_ctrl, &g_external_irq7_cfg);
g_external_irq7.p_api->enable(&g_external_irq7_ctrl);
}在irq.c文件中定义了初始化函数IRQ_Init,并实现按键中断回调函数key_irq_callback。
3.2 低功耗模式
新建lpm.h
查看代码
c
#ifndef LPM_H_
#define LMP_H_
#include "hal_data.h"
extern volatile bool in_LPM;
void LPM_Init();
void EnterLowPowerMode();
#endif新建lpm.c
查看代码
c
#include "lpm.h"
#include "hal_data.h"
volatile bool in_LPM = true; // 在低功耗模式的标志位 防止用按键唤醒了又立即进待机
void LPM_Init()
{
g_lpm0.p_api->open(&g_lpm0_ctrl, &g_lpm0_cfg);
}
void EnterLowPowerMode()
{
if(!in_LPM){
printf("进入低功耗模式\n");
in_LPM = true;
g_lpm0.p_api->lowPowerModeEnter(&g_lpm0_ctrl);
}
}EnterLowPowerMode是进入低功耗模式的函数,LPM_Init是初始化低功耗模式的。
3.3 修改hal_entry.c
hal_entry函数之前
查看代码
c
#include "hal_data.h"
#include "debug_bsp_uart.h"
#include "rtc.h"
#include "irq.h"
#include "lpm.h"
rtc_time_t get_time;在hal_entry函数内添加
查看代码
c
Debug_UART9_Init(); // SCI9 UART 调试串口初始化
RTC_Init();
IRQ_Init();
LPM_Init();
while (1)
{
if (key_pressed)
{
key_pressed = false;
if(!in_LPM){
EnterLowPowerMode();
printf("退出待机模式\n");
}
else{
in_LPM = false;
}
}
if (rtc_flag)
{
g_rtc0.p_api->calendarTimeGet(&g_rtc0_ctrl, &get_time); // 获取 RTC 计数时间
rtc_flag = 0;
printf("%d年%d月%d日 %d:%d:%d\n",
get_time.tm_year + 1900, get_time.tm_mon + 1, get_time.tm_mday,
get_time.tm_hour, get_time.tm_min, get_time.tm_sec);
}
if (uart_rx_complete_flag)
{
char *time;
uart_rx_complete_flag = 0;
// 解析设置时间的命令 e.g: time:20250126080910
// warning: 未添加错误纠正算法,请输入正确的时间,否则工作异常!
if (strncmp(rx_data, "time:", 5) == 0)
{
time = rx_data + 5;
set_time.tm_year = ((time[0] - '0') * 1000) + ((time[1] - '0') * 100) +
((time[2] - '0') * 10) + (time[3] - '0') - 1900;
set_time.tm_mon = ((time[4] - '0') * 10) + (time[5] - '0') - 1;
set_time.tm_mday = ((time[6] - '0') * 10) + (time[7] - '0');
set_time.tm_hour = ((time[8] - '0') * 10) + (time[9] - '0');
set_time.tm_min = ((time[10] - '0') * 10) + (time[11] - '0');
set_time.tm_sec = ((time[12] - '0') * 10) + (time[13] - '0');
g_rtc0.p_api->calendarTimeSet(&g_rtc0_ctrl, &set_time);
}
}
}TIP
主程序设计为按键按下即进入待机模式,这里只是为了快速实现效果,而采用的按键触发方式,可以是串口发消息触发、程序逻辑调用等等方法进入待机模式。